纏繞機工作時,絲嘴與芯模表面產(chǎn)生相對位移�,使纖維纏繞在芯模表面。纖維每一個可移動的方向稱為一個自由度或一個軸�,自由度越多可實現(xiàn)的纏繞方式就越復雜。機械式纏繞機一般只能實現(xiàn)兩自由度運動,即在主軸轉(zhuǎn)動的同時小車沿軸向移動����,稱之為兩軸纏繞機。
纏繞機是纏繞成型工藝的主要設備�,纏繞制品的設計意圖和性能都要通過它來實現(xiàn)。
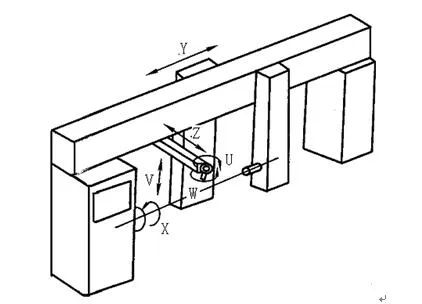
纏繞機工作時���,絲嘴與芯模表面產(chǎn)生相對位移���,使纖維纏繞在芯模表面。纖維每一個可移動的方向稱為一個自由度或一個軸��,自由度越多可實現(xiàn)的纏繞方式就越復雜�。機械式纏繞機一般只能實現(xiàn)兩自由度運動,即在主軸轉(zhuǎn)動的同時小車沿軸向移動�����,稱之為兩軸纏繞機�����。微機控制纏繞機出現(xiàn)后�����,使實現(xiàn)多自由度運動變得簡單���,目前國際市場商品化的纏繞機達到了六軸���,如圖7-21所示,其劃分如下:
1.主軸(X)���,使芯模作回轉(zhuǎn)運動���;
2.小車水平軸(Y),使絲嘴沿芯模軸向作往復運動����;
4.絲嘴翻轉(zhuǎn)軸(U),使絲嘴繞伸臂軸轉(zhuǎn)動���;
5.降軸(V)�����,使絲嘴作垂直于伸臂軸和主軸方向的運動���;
6.扭轉(zhuǎn)軸(W)����,使絲嘴繞升降軸轉(zhuǎn)動�。
纏繞機按控制形式不同可分為機械式����、數(shù)字控制、微機控制及計算機數(shù)控纏繞機四大類����,這也是纏繞機發(fā)展的四個階段。目前常用的是機械式和計算機數(shù)控纏繞機�����。
機械式纏繞機具有結(jié)構(gòu)簡單����、傳動可靠��、維修方便�����、容易制造及投資較少等優(yōu)點,適用于形狀比較簡單的制品纏繞�����,目前乃至將來仍然會有大量應用���。根據(jù)芯模和纖維供給機構(gòu)(繞絲嘴)結(jié)構(gòu)特點和運動形式的不同��,機械式纏繞機可分為以下幾種:
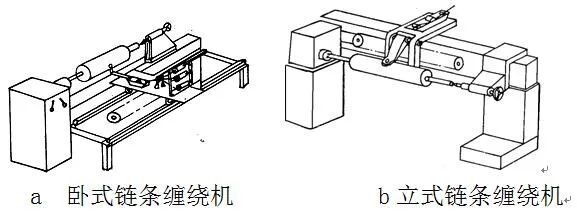
(1)小車環(huán)鏈式纏繞機(如圖7-22所示):
(3)滾轉(zhuǎn)式纏繞機(如圖7-24所示):
1-縱向?qū)蛹啽P�;2-轉(zhuǎn)環(huán)��;3-芯模��;4-小車��;5-小車絲桿�����;6一小車導軌;7-轉(zhuǎn)環(huán)旋轉(zhuǎn)傳動機構(gòu)��;8-環(huán)向纏繞紗架��。
圖7-26 電纜機式縱環(huán)向纏繞機示意圖
其中�����,小車環(huán)鏈式纏繞機包括臥式和立式兩種����,它的芯模水平放置,以環(huán)鏈和絲桿帶動小車運動��。進行螺旋纏繞時����,芯模繞自身軸勻速轉(zhuǎn)動,小車在平行于芯模軸線方向往復運動����,調(diào)整相對運動的速度可以改變螺旋角,一般為12°~70°���。進行環(huán)向纏繞時����,只在筒身段上進行,小車移動速率變慢��,芯模轉(zhuǎn)速變快��,纏繞角控制范圍通常在85°~90°之間���。小車環(huán)鏈式纏繞機適合于縱向只有單一角度的管、罐形制品生產(chǎn)���。
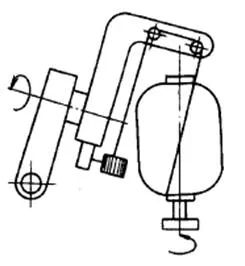
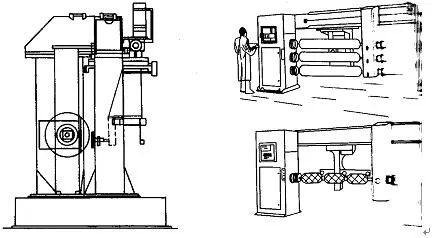
繞臂式纏繞機又稱立式纏繞機��,它的繞臂以小角度傾斜����,位于繞臂端部的絲嘴則隨繞臂的旋轉(zhuǎn)在一固定平面內(nèi)做勻速圓周運動�����。芯模繞自身軸線慢速移動���,繞臂(絲嘴)每轉(zhuǎn)一周���,芯模轉(zhuǎn)動一微小角度����,反映在芯模表面上是一個紗片寬度�。紗片與兩端孔相切,依次連續(xù)纏繞到芯模上����。改變繞臂傾斜角度可以調(diào)整纏繞角,通過絲桿驅(qū)動絲嘴上下往復運動來完成環(huán)向纏繞�����。
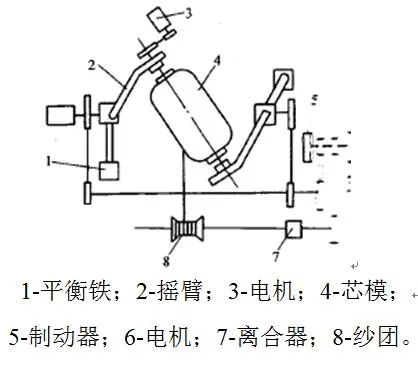
球形容器纏繞機的球形芯模懸臂連接在擺臂上��,芯模既能隨擺臂擺動�,又能在擺臂上繞自軸轉(zhuǎn)動。繞絲嘴與浸膠裝置都固定在轉(zhuǎn)臺上��,轉(zhuǎn)臺內(nèi)裝置紗架���,膠量由計量泵進行控制���。
現(xiàn)代纖維纏繞工藝技術的發(fā)展要求纏繞設備具有較高的精度��、較大的靈活性和通用性�����,以適應不同結(jié)構(gòu)形式纏繞制品的成型要求���。為實現(xiàn)一些特殊異形形狀制品(如三通、彎頭等)的纏繞���,繞絲頭的運動坐標(自由度)已由一個發(fā)展到多個����,再加上芯模主軸的旋轉(zhuǎn)(或擺動)��,就能使纖維不產(chǎn)生滑移地按初始線型設計進行精密排布��。機械式纏繞機要改變產(chǎn)品規(guī)格和線型���、即調(diào)整繞絲嘴與芯模運動關系相對困難,且無法實現(xiàn)復雜形體和復雜線型的纏繞�。隨著電子技術的發(fā)展,計算機控制纏繞機應運而生��。
計算機控制纏繞機與機械式纏繞機的根本差別在于執(zhí)行機構(gòu)動力源均采用獨立的伺服電動機,各個機構(gòu)(運動軸)間的運動關系不是由機械傳動鏈確定�,而是由計算機控制的伺服系統(tǒng)實現(xiàn),因此可以實現(xiàn)多軸纏繞��,如圖7-29所示�����。計算機控制纏繞機的執(zhí)行機構(gòu)多采用精密傳動器件�,落紗準確、張力控制穩(wěn)定����。
計算機控制纏繞機除纏繞機主體外,尚有控制和伺服傳動兩個系統(tǒng)���?����?刂葡到y(tǒng)由控制介質(zhì)及控制裝置組成���。控制介質(zhì)用于記載整個加工工藝過程,以便為控制裝置所接受��??刂茩C構(gòu)也就是整個設備的計算部分。伺服傳動系統(tǒng)主要是經(jīng)伺服機構(gòu)(包括伺服放大及功率放大)后驅(qū)動執(zhí)行機構(gòu)���,往往還有傳動機構(gòu)���,并有檢測裝置。
計算機控制纏繞機和機械式纏繞機相比��,具有無可比擬的優(yōu)點:它可以使纏繞工作變得更加科學化���。如對工藝參數(shù)的優(yōu)化組合�,不需要再進行常規(guī)的實驗�����,借助計算機就可直接完成�。這就保證了整個纏繞工藝過程中���,每一個對產(chǎn)品質(zhì)量有影響的因素�,都視為工藝參數(shù)。工藝參數(shù)可以在計算機上用示數(shù)法進行優(yōu)化組合��。被優(yōu)化組合的工藝參數(shù)被作為指令輸入到計算機控制系統(tǒng)中付諸實施�����,這不僅減輕了過去的繁瑣試驗��、數(shù)據(jù)歸納���、分析計算��,也擴大了纏繞制品的應用領域���。目前,已有機械手操縱纏繞機�,大大減輕了人的勞動程度,并向高層次的機械化����、自動化、機器人操作等方面發(fā)展���。
纏繞機通常由機身����、傳動系統(tǒng)和控制系統(tǒng)等幾部分組成,此外還包括浸膠裝置�、張力測控系統(tǒng)、紗架��、芯模和加熱器�����、預浸紗加熱器及固化設備等輔助設備��。
無論是機械式纏繞機還是計算機控制纏繞機�����,機械系統(tǒng)是相同的��。包括機架�����、動力系統(tǒng)����、傳動系統(tǒng)、運動系統(tǒng)和芯模夾持系統(tǒng)等���。
機架是纏繞機的主體和各個系統(tǒng)安裝的基礎�,按主軸位置可以分為立式和臥式�����。臥式結(jié)構(gòu)是常見的結(jié)構(gòu)形式����,門架式和支座式是臥式結(jié)構(gòu)的兩種主要形式。
門架式系統(tǒng)是中���、小型纏繞機常用的結(jié)構(gòu)形式�����,又可分為單工位和多工位����,其中多工位有并聯(lián)和串聯(lián)兩種形式。如圖7-30所示的門架式纏繞機具有以下優(yōu)點:
a.機架整體好��,剛性大�����,運輸安裝方便���,可以有效的利用空間�����;
b.芯??梢詮南旅嫱迫?���,裝卸方便,地面容易保潔;
支座式系統(tǒng)主要適于大型纏繞機����,由于芯模尺寸大���、重量重�,采用支座式結(jié)構(gòu)��、配以天車便捷地完成裝卸芯模�。由于主軸與小車系統(tǒng)分列��,安裝調(diào)試難度較大�����。
纏繞機動力系統(tǒng)主要有兩種方案�����,一種方案是主軸與其他系統(tǒng)均采用伺服電動機��,可以實現(xiàn)0°纏繞,但成本較高,尤其是主軸系統(tǒng)功率較大時更為突出:另一種方案是主軸采用普通調(diào)速電機���、其他系統(tǒng)均采用交流伺服電動機,以主軸運動參數(shù)為基準實施控制。
纏繞機的傳動系統(tǒng)主要有齒輪-鏈條傳動�、齒輪-齒條傳動����、滾珠-絲杠傳動和齒輪傳動等�。纏繞機傳動系統(tǒng)的精度主要由傳動精度控制�,因此選擇合適的傳動系統(tǒng)相當重要�。
由于纏繞機運動系統(tǒng)速度較高���,運用目前普遍采用滾動導軌和直線軸承,以提高精度���,對于精度要求不高的系統(tǒng)�����,如普通管道纏繞機,考慮成本,也可以常用普通導軌道導輪系統(tǒng)。
芯模夾持主要有卡盤-頂針式、卡盤-卡盤式���、法蘭-軸承支架式?����?ūP-頂針式適于中等尺寸的芯模,單端驅(qū)動,安裝方便���,為提高自動化程度�����,可以采用氣動頂針��?����?ūP-卡盤式主要適于細長桿纏繞����,一方面可以采用雙端驅(qū)動�����,降低由于扭矩使芯模產(chǎn)生的扭角��,另一方面可以安裝氣功/液壓拉伸芯軸,纏繞時芯軸受拉,降低由于芯模重力引起的撓度。軸承支架式主要適于大型芯模,驅(qū)動力矩大。
機械式纏繞機的運動控制系統(tǒng)簡單��,運動關系是由機械系統(tǒng)確定的��。數(shù)控纏繞機中運動控制系統(tǒng)是纏繞機的核心,靠其完成各軸間的運動關系,從而實現(xiàn)各種線型的纏繞。主要有兩種方案:
a.采用通用數(shù)控系統(tǒng)��,如:SIEMENS810(3軸聯(lián)動)�����、SIEMENS840D(4軸聯(lián)動等)�;采用通用數(shù)控系統(tǒng)的纏繞機���,集成程度較高�����,維護方便�,但成本高�����、運動軸數(shù)少��、纏繞編程靈活性和機器拓展性差���。
b.采用分布式數(shù)控系統(tǒng)�,即依據(jù)纏繞機的特點與具體需求,將多軸運動控制卡等集成為一個纏繞數(shù)控系統(tǒng)�����,如南京航空航天大學和萬格復合材料技術公司共同開發(fā)的FWP2000系統(tǒng)(7軸聯(lián)動)等�,具有成本低、運動軸數(shù)多�、纏繞編程靈活等優(yōu)點,但應用尚不夠廣泛���。
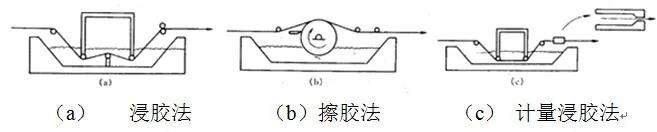
纖維纏繞工藝中常見的浸膠形式有三種:浸膠法����、擦膠法和計量浸膠法(如圖7-31所示)��。
簡單的浸膠槽通常沒有運動的部件����,它們由浸膠輥���、膠槽和壓膠輥組成�����。多根纖維紗通過浸膠輥浸上樹脂�����,然后通過第二浸膠輥和壓膠輥及分紗孔,后纏繞到芯模上���。在高速纏繞時�����,纖維束的浸潤可以通過一個轉(zhuǎn)動的輥使纖維束鋪開以改善其浸透性�,在這基礎上加裝限膠孔有助于控制纏繞制件的樹脂含量�����。
擦膠法適合于玻璃纖維和芳綸纖維纏繞,因為玻璃纖維和芳綸纖維損傷容限較大���。在擦膠法浸漬裝置中,一個轉(zhuǎn)動的圓筒和樹脂槽內(nèi)的樹脂接觸帶起樹脂,經(jīng)過刮刀后在圓筒表面形成樹脂薄層,纖維在圓筒上部經(jīng)樹脂薄層浸膠,纖維在低應力水平下浸漬�,因此纖維不易損傷。擦膠法的缺點主要是纖維如有損傷,斷裂的纖維會粘在轉(zhuǎn)動圓筒的表面,越積越多����,從而影響樹脂的含量以及增加纖維損傷�,須隨時注意并加以清洗。
第三種樹脂浸漬形式為計量浸膠法�,即限膠法浸漬��。將纖維和樹脂引入一個一端大開口的通道���,通道的另一端是一定寬度的機加孔,在通道內(nèi)樹脂充分浸漬纖維,經(jīng)過機加孔時多余的樹脂被擠出�����。這一方法的優(yōu)點是樹脂含量可嚴格控制。缺點是纖維的接頭不能通過,對于不同的樹脂體系和含膠量都必須更換限膠孔。
在纖維纏繞中纖維張力控制是獲得具有優(yōu)良性能復合材料的關鍵�,纏繞張力的控制精度很大程度上決定了纏繞制品的質(zhì)量����。張力控制系統(tǒng)有機械式和電子式兩種���,均由張力傳感器、張力控制器和張力測控系統(tǒng)組成�。張力裝置應具有下列功能:纏繞張力可變��、可控��;纏繞張力便于調(diào)整��;張力器具有繞緊功能,避免纖維松弛;隨著紗管尺寸的變化張力可自動補償。大多數(shù)增強材料多用紗管形式包裝,因此張力器常常安裝在紗管上,這樣便于遠距離控制張力��。同時�,又便于在繞絲嘴運動中控制供紗系統(tǒng)的張力����。新一代張力器裝有傳感裝置��。通過監(jiān)控器監(jiān)控紗束上的實際張力����。實時調(diào)整纏繞張力���,使其保持均衡。
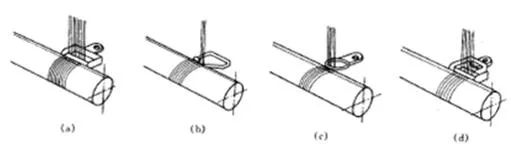
對于不同的樹脂/纖維體系選用纖維鋪展裝置時應考慮到盡量減小對纖維的損傷和浸膠紗帶在芯模上的合理展開與鋪疊�����。利用大而光滑的弧形繞絲嘴和導向環(huán)能減少纖維損傷���,使用陶瓷和表面鍍鉻能減少纖維和導向環(huán)相互之磨損�。纏繞中纖維的覆蓋狀況取決于纖維束寬度�����,在纖維束寬度方面的變化能導致纏繞縫隙或不希望的纖維重疊�。事實上��,纖維寬度是利用不同的繞絲嘴來控制的�,圖7-32為幾種常用的繞絲嘴形式����。
紗架是貯存纖維、安裝后置張力器的部件����,重量較大。主要有三種類型:a)紗團較少時紗架直接安在小車上���,張力波動?�?�;b)紗團較多時(6團以上)�,紗架重量很大,直接裝在小車上穩(wěn)定性不好����,因此紗架固定,但由于小車運動�����,會使張力波動�����;c)為減少由于 紗架固定引起的張力波動����,采用隨動紗架����,即紗架由另一套系統(tǒng)驅(qū)動,與小車同步����。
電加熱或氣加熱烘箱是傳統(tǒng)的固化設備����,投資少可做成不同的尺寸形狀����。采用烘箱固化,所需固化壓力由收縮帶或空氣袋提供��。在許多情況下�����,例如對于纏繞管和另外一些圓形制件�,固化過程中制件應保持轉(zhuǎn)動以減少下垂和樹脂滴落。因為不僅要加熱制件�,而且包括周圍的空氣以及輔助設備如芯模和支撐體。烘箱的能耗花費較多�����,大的烘房也要占用較大的空間�����。
加熱燈也可提供一個為170℃左右的固化溫度。在使用加熱燈作為熱源時��,應注意盡量使制件各部分受熱均勻����。加熱燈固化的缺點是樹脂外首先形成一層表皮,而這層表皮阻止在固化過程中的進一步熱傳遞�。紅外燈是復合材料固化常用的加熱燈,常在使樹脂從A階段轉(zhuǎn)變?yōu)锽階段過程中使用���。
而對于航空航天用高質(zhì)量制件而言�����,樹脂基體往往采用高性能環(huán)氧樹脂���、雙馬來酰亞胺或聚酰亞胺�,有必要采用真空袋/熱壓罐固化纖維纏繞件。熱壓罐固化能提供400℃的固化溫度和3.5MPa的固化壓力���。熱壓罐固化的主要缺點是長的固化周期以及尺寸等方面的限制�����。
許多纏繞管材的廠家還使用蒸汽作為樹脂固化的熱源���。當管道纏繞完畢后��,熱蒸汽經(jīng)金屬芯模端部接頭通過管狀芯模����,纏繞件快速固化��。完全固化后����,利用冷卻水快速冷卻。這樣做既能方便操作����,提率,也能提供足夠的收縮以使脫模更為容易���。
此外���,電子束、激光����、射頻��、超聲���、微波和誘導固化方法都在纖維纏繞工藝中試用且有不同程度的成功。超聲可使樹脂體系快速固化但這種固化不均勻��。射頻固化已得到許多研究并被認為是一個有希望的加熱固化方式�。針對射頻固化所開展的初步研究工作證明它是一個有應用前景的加熱固化方式。激光加熱已基本被否定��。微波固化爐初始投資高����,但固化效率高,能源利用率也高��,具有顯著的節(jié)能效果��,但是對于導電的碳纖維不能使用�。